
14·
12 hours agoWhy are reactionaries so obsessed with semen?
Hexbear’s resident machinist, absentee mastodon landlord, jack of all trades
Talk to me about astronomy, photography, electronics, ham radio, programming, the means of production, and how we might expropriate them.>
Why are reactionaries so obsessed with semen?
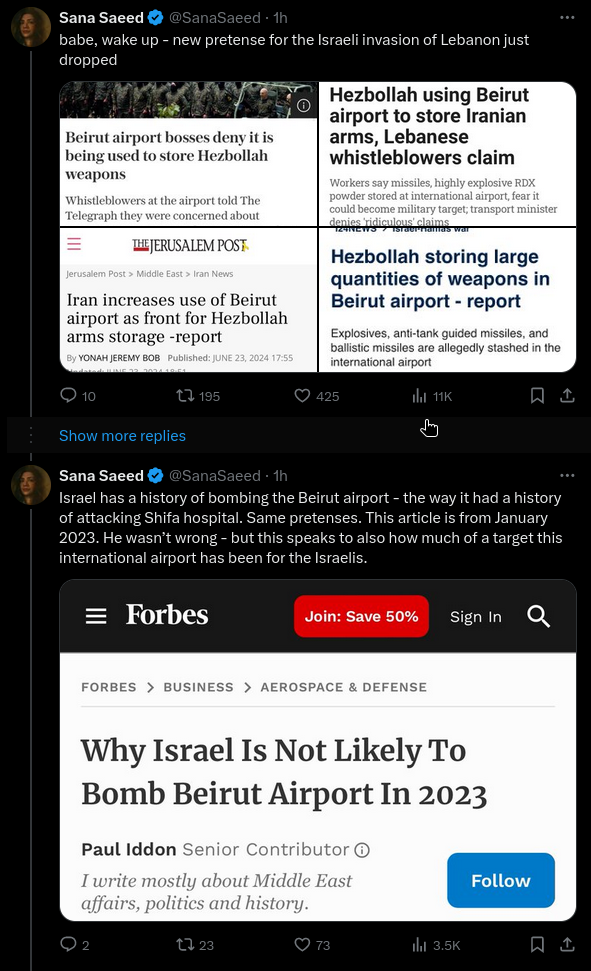
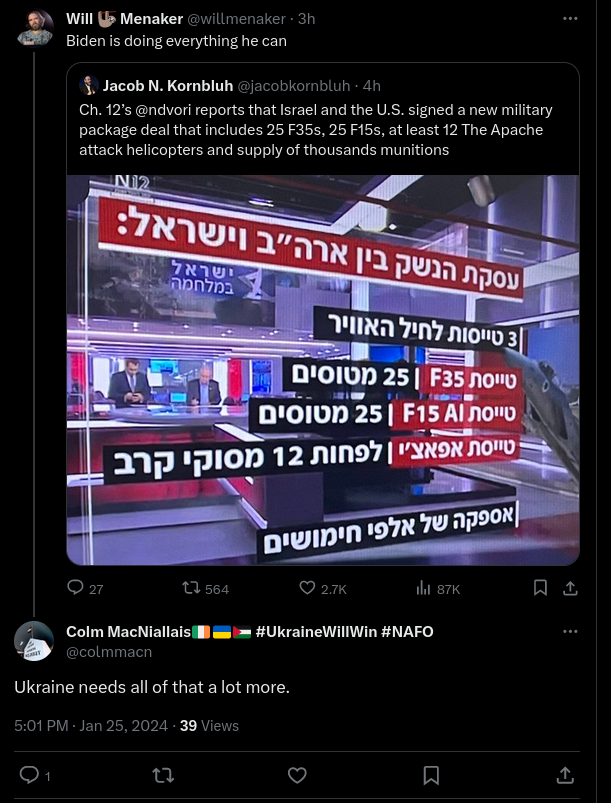
Israeli press seems to be making a lot of hay about the Beruit International Airport being a staging ground for Iranian weapons. The classic stovepipe straight from military “intelligence” to credulous media stenography, no different than the Iraqi WMD bullshit in 2003.
They are establishing a pretext to bomb it.

Update:
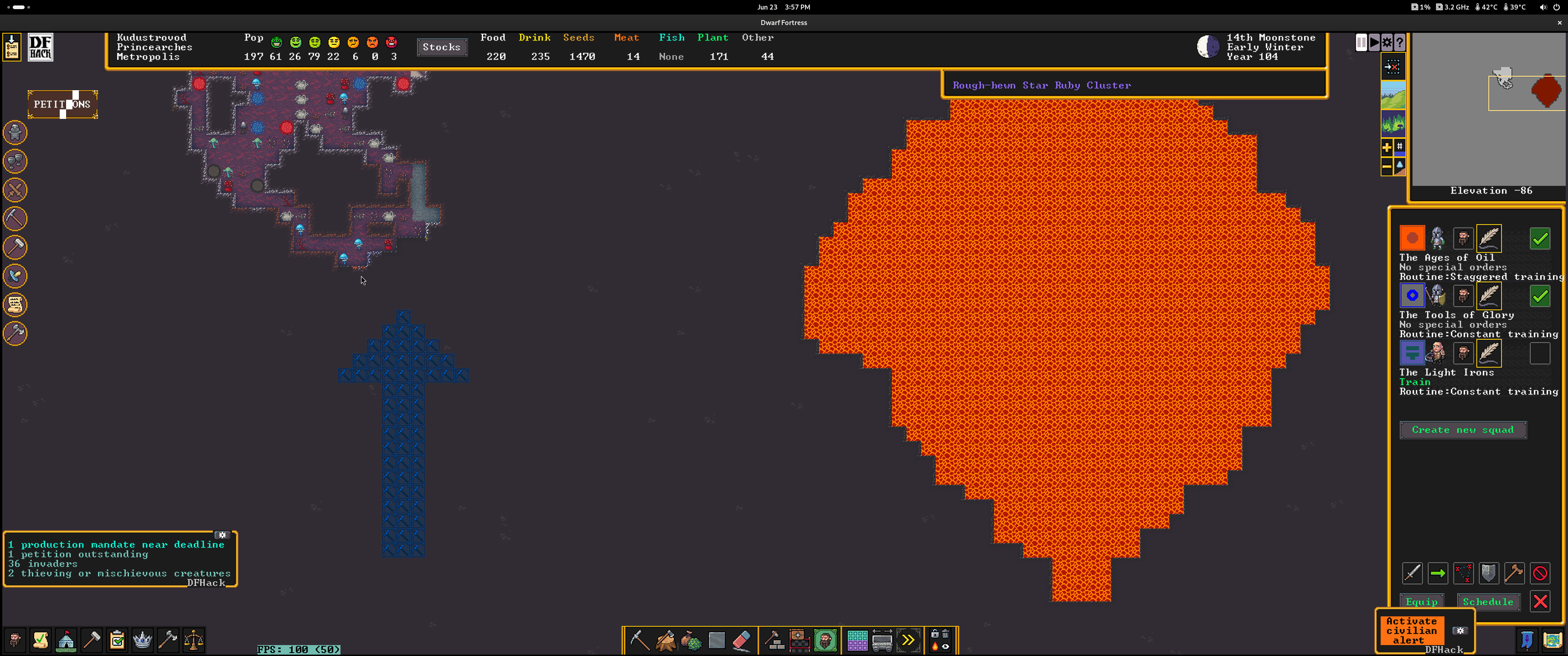
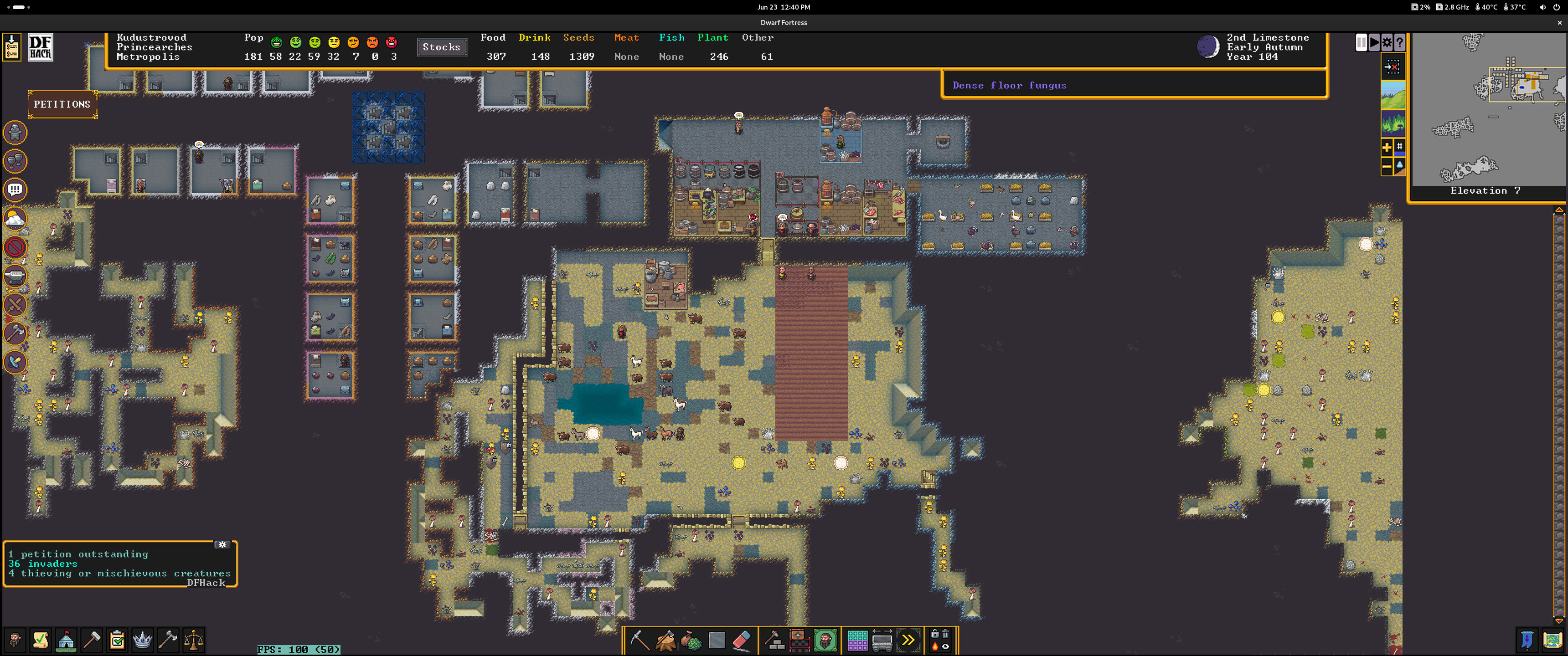
Discovered the third cavern layer, along with a magma pool and an “unusual volcanic wall studded with gems.” No signs of life in here aside from vermin and a couple more rutherers, but there are pieces of abandoned Bat Man armor lying around. In the mid-long term, this ought to be our new base, as we can set up magma-powered smelters, kilns, and forges without building an 80-layer tall pump stack or minecart elevator. Last time I tried to build an absurdly tall minecart elevator it took me several in-game YEARS to dig and a level of micro-management which lead to various other disasters in the fort being ignored.
Also, there is a direct shot from the farm on the top cavern to the magma pool, if I want to set up a garbage chute.
Cave adaptation doesn’t seem so bad as long as it doesn’t hit your military the moment a seige occurs. It doesn’t cause any more permanent harm than dragging the 50th goblin corpse to the trash heap does.
I had another Ettin come to visit but she walked straight into a cage trap and now just lives in one of my stockpiles.

There are many overlapping disciplines involved here. CAD/CAM and 3D printing will go a long way towards customization and specialization, but the components of an off-the-shelf model will probably be made using superior techniques and materials for the most part. I would choose something which is affordable and use these skills to try and augment its capabilities.
A more general grasp on flight and navigation could be quite useful. Planes, helicopters, and quad-copters behave quite differently. Quad-copters are incredibly maneuverable (with the aid of gyro sensors and complex stability-assist motor control firmware right on the drone), but they are also incredibly power-hungry compared to a more conventional RC airplane design. Spend some time thinking about what you are trying to accomplish, and choose an appropriate vehicle. Consider spending some time in a flight simulator (FlightGear is free software) to learn basic VFR/IFR navigation techniques, in addition to getting an idea of what causes a class of aircraft to stall and lose control in general.
Definitely study ham radio. If I were planning on using a drone to do ANYTHING cool, I would be highly motivated to gut the electronics. By starting from scratch, you know it won’t have any snitchware in it, and you can make more fundamental choices about RF bands, antenna design, and transmission power. Choosing an appropriate band and antenna design are key if you are trying to control the thing from range. Even if you do not modify anything electronically from an off-the-shelf drone, a general understanding of ham radio will still give you many insights about how RF interference, control station position, RF frequency, and terrestrial obstructions will impact the signals, as well as an understanding about how RF triangulation and other countermeasures might be used to identify you. If you are doing anything super sketch, you don’t want to be holding the controller and you don’t want the controller to be located anywhere near you. I would try to set up a control station which relays controls across the internet and find a way to send it commands anonymously through the internet. Some Mr. Robot shit.
Start small. Mess around with the technology in completely benign ways. Learn the capabilities and limitations, and in the back of your mind, think about ways it can be applied.
If you are trying to construct a quad-copter drone from scratch, I am no expert, but I do have some experience with robotics from working with CNC machinery for a decade. PID controllers are they key to any closed-loop servo mechanism, and are used throughout navigation, avionics, and autopilot systems as well. They are used to target a setpoint (altitude, airspeed, angle of attack, heading, etc) and integrate historical sensor inputs to determine the correct amount of force to be applied to reach that setpoint as efficiently as possible. These are the basis of most industrial robotics as well as the cruise control in your car and the flight control systems you’ll find in a modern airliner or a quadcopter drone. There are a lot of examples on Youtube and across the internet of people using Arduino boards to design various PID controllers.
Checking the megathread every morning to see if Israel has been destroyed yet 

Amerikkka deserves this
a really strategically sound idea that could have only come from the best Western generals
These people genuinely believe they are wearing plot armor.
If you bring a couple tarps and a liberal supply of paracord, you can build just about any shelter you can imagine.
God damn it, lmao.
I still use Transmission.
I am begging on my hands and knees for one, JUST ONE mouse where the sensor in the wheel does not go out of sync with the physical clicks and capture double / reverse / nil inputs arbitrarily. I’ve gone through like 5 mice from different brands where this shit happens.
It will be a LONG time before 24 threads at 3.7 GHz is unworkable. Aside from gamer slop, software will be targeting much less performant machines for a very long time. I was running Gentoo on an i7-4770k (8 threads at 3.5GHz) up to this year and the only reason I switched was because the 32GB RAM limit of the architecture was finally beginning to constrain me, 10 CPU generations later. And though the clock speeds of these CPUs hasn’t changed significantly, they have MUCH larger caches nowadays. That old machine is still more powerful than the CAD/CAM workstation IT provides me at work.
Another anecdotal comment. I got a curved monitor and IMO it was not worth the extra cost vs. a flat one. I think these things are kind of gimmicky unless you are buying several of them and building a simulator (I do flight sim and I don’t see any benefit with just one, even).
Anecdotally, I never had performance problems with Nvidia on Linux. Just other annoyances, like it taking a very long time for them to properly support Wayland (historically poor performance in XWayland, moot for several years now, but the workaround of just sticking with XOrg was workable), needing to compile out-of-tree kernel modules (usually managed by the distribution, but annoying if you need to run bleeding kernels for other reasons), and having it’s own proprietary OpenGL / Vulkan implementations instead of running Mesa3D at full performance.
When I switched to AMD, I noticed little things, like the screen doesn’t flicker when I activate a second monitor, and having monitors with different refresh rates worked. Gains from Wayland working as intended, mainly.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
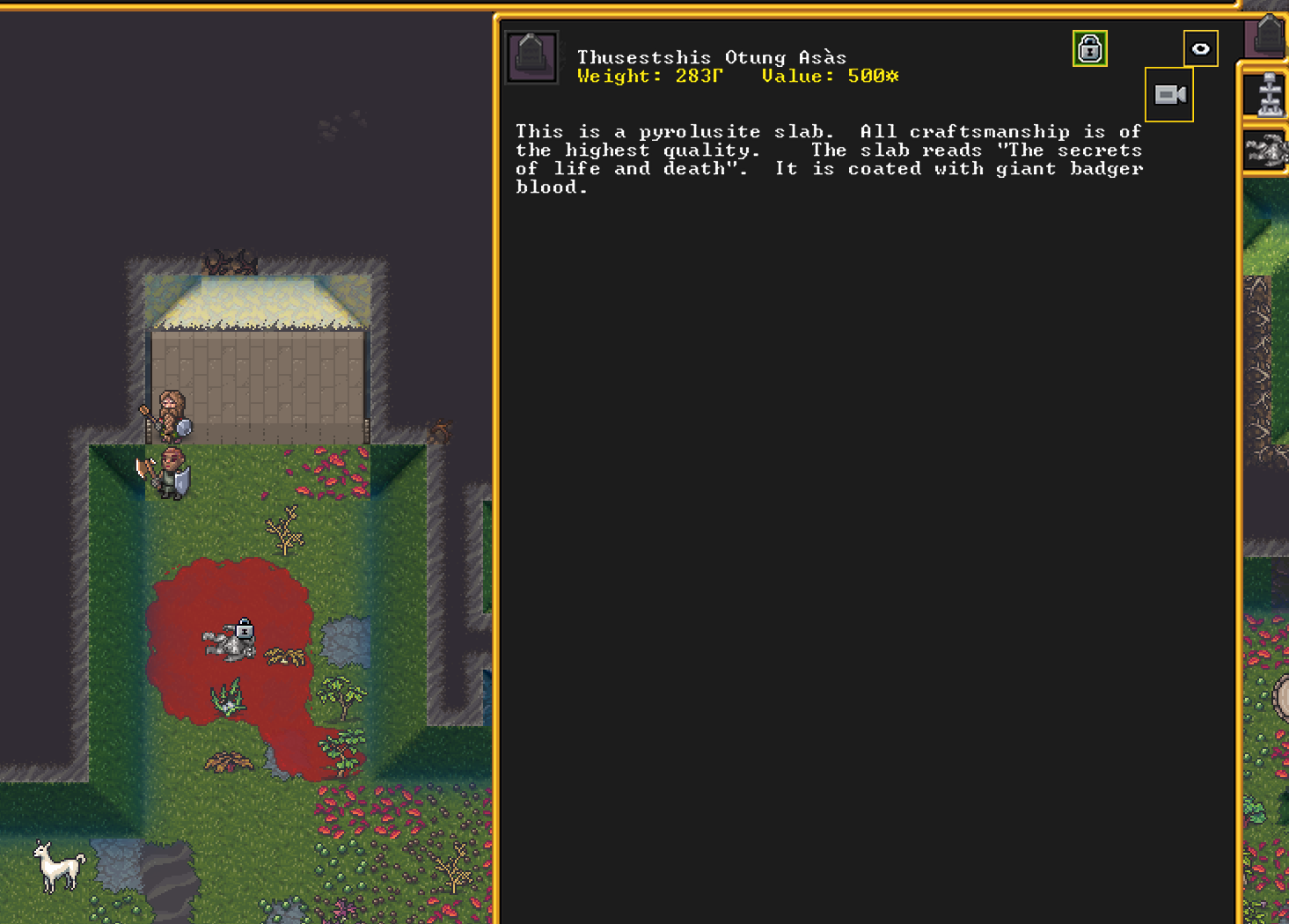
Started building a new hub centered around a magma workshop (This is actually the first time I have ever gotten to build magma workshops in this game. First time I have ever tapped a magma tube). A web-shooting forgotten beast turned up but the rutherers have severely injured it for me.